Catch problems early.
Protect every
harvest.
AgroExplorer One flies your fields autonomously — detecting disease, weeds, and crop stress with onboard AI while you monitor from the ground. Every mission ends with a georeferenced report: detection log, coverage trace, and full telemetry — ready the moment it lands.




Your farm's autonomous field scout.
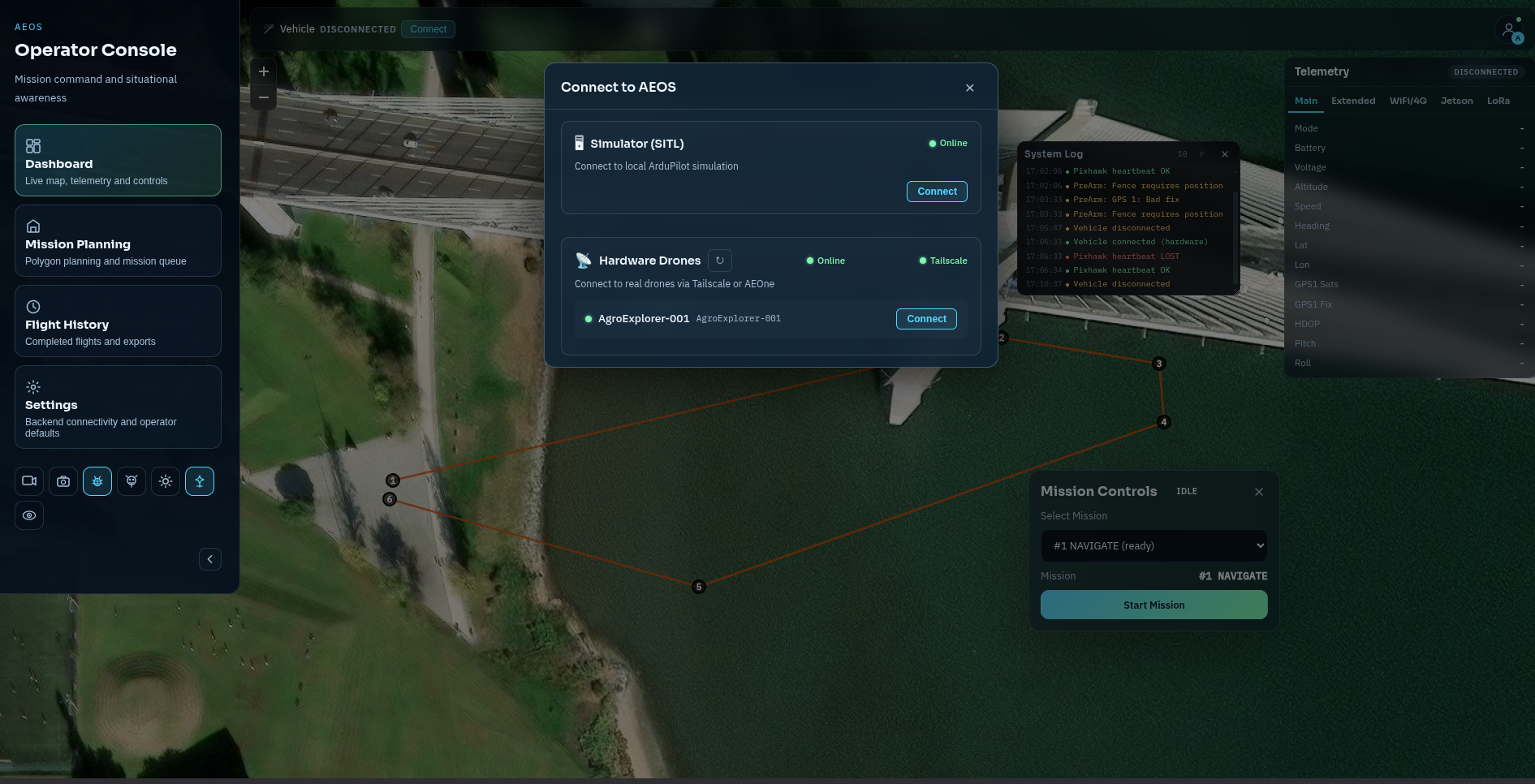
Percivor is TwoAeon's autonomous agricultural system. AgroExplorer One is its first vehicle — built and flying in Portugal today, controlled end-to-end by AEOS, the Autonomous Exploration Operating System.
You define the field. It flies the mission. No pilot. No remote control. No cloud dependency. The drone takes off, surveys your crop, flags problems with onboard AI, and returns — while your team watches live from a browser dashboard. By the time it lands, the report is already there.
- Flies a pre-planned survey route fully autonomously — takes off, surveys, lands by itself
- Detects disease, weeds, and pests frame-by-frame with a neural network during the flight
- Produces a GPS-tagged report after each mission: detection log, coverage trace, NDVI map
- Stays connected over WiFi, 4G, or LoRa — switches links automatically if one drops
- Athena AI assistant answers questions about the mission in natural language, mid-flight
- Ground servers stitch orthomosaics and compute vegetation indices after landing
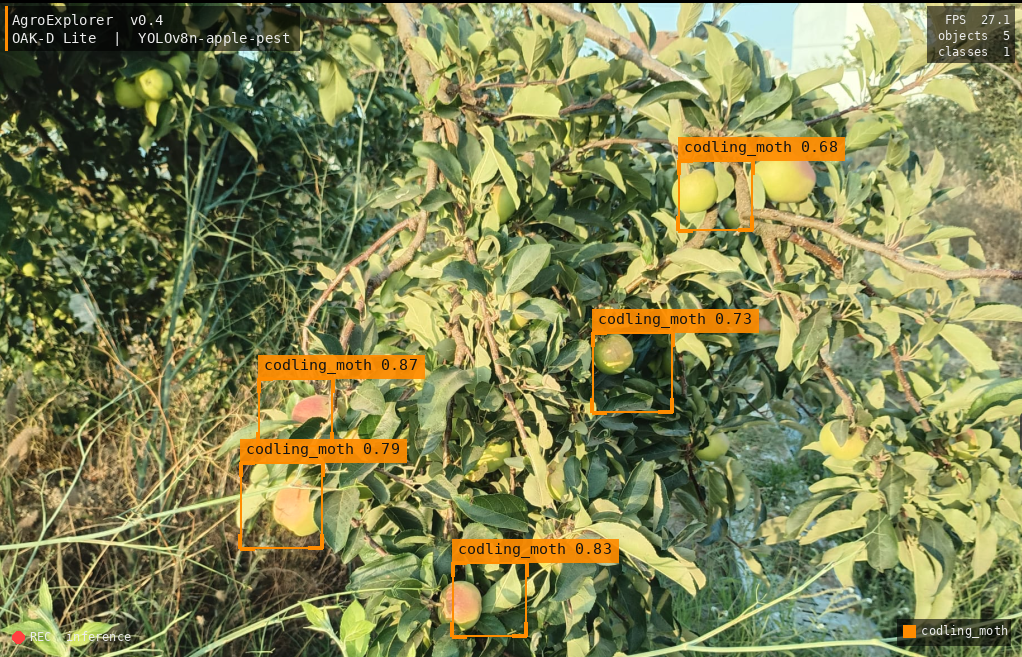
Real detections. Real fields. Real results.
These are actual outputs from AgroExplorer One during field operations — YOLOv6 running onboard the OAK-D Pro's Myriad X VPU, identifying fruit and crop anomalies at altitude with GPS coordinates attached to every detection.

Resilient by design. Reliable in the field.
Three independent communication layers — WiFi, 4G, and LoRa — mean AgroExplorer stays connected and completes its mission even if the primary link drops completely. One system fails; the others take over.
Control Plane
MAVLink between the AEOS behavior-tree engine and Pixhawk 6X via MAVProxy on UART at 921 600 baud. Navigator runs at 25 Hz, emitting setpoints from A-Star voxel path planning.
Data Plane
MQTT carries HMAC-signed telemetry at 5–10 Hz, adaptive JPEG snapshots, compressed depth-map tiles from OAK-D, YOLO detection events, and mission state to the ground station WebSocket.
Survival Plane
LoRa (Heltec SX1262) carries position beacons and out-of-band heal commands — restart Tailscale, switch route, reset modem, reboot Jetson — when both WiFi and 4G are down, with no IP required.
RTL8822CE · M.2 PCIe · powersave off
Probe: 5 s · switch on 3 failures (15 s) · restore on 2 success (10 s)
D-Link DWM-222W · CDC-Ether eth0
Data-path verified at boot · USB-hub reset on error-71
Heltec V3 SX1262 · 115 200 baud
Position beacons · heal-commands when all IP links are down
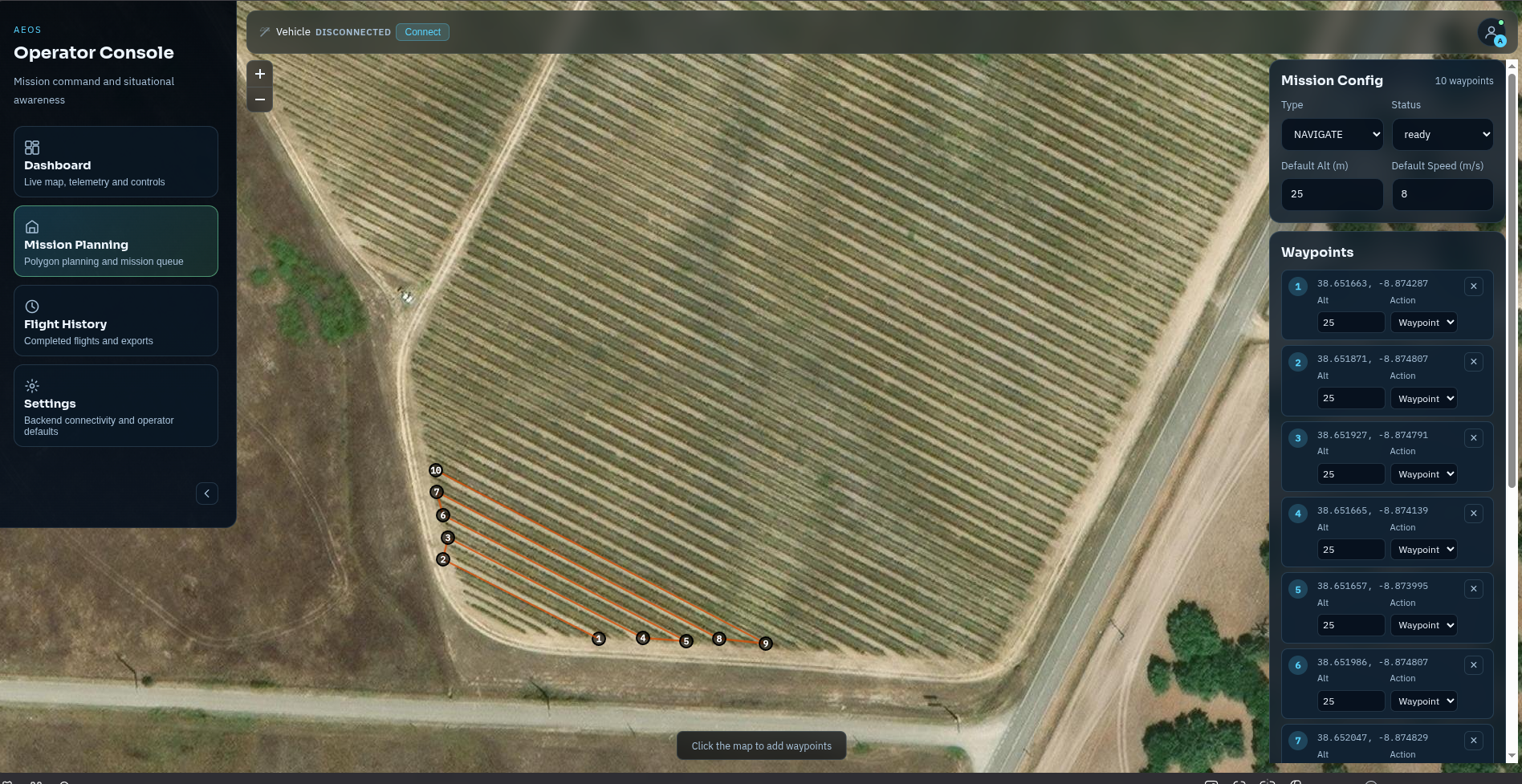
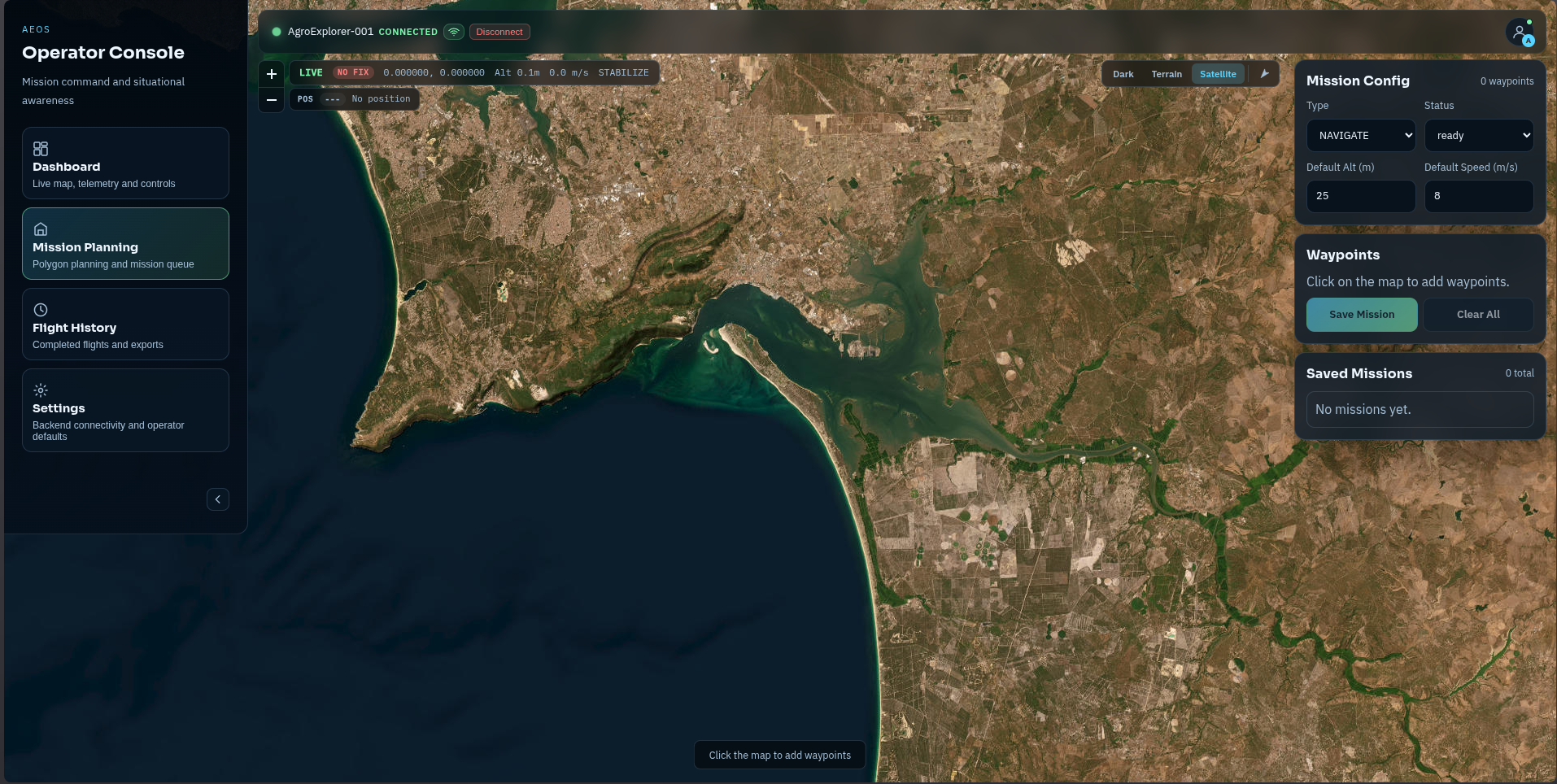
Plan once. Fly precisely.
Define your survey in the ground station, submit it to the drone, and let AEOS handle the rest. The flight executor follows the plan exactly — and re-routes around obstacles in real time if anything gets in the way.
Pre-arm gates
HDOP < 2.0 · GPS fix ≥ 3 · battery ≥ 20 % · EKF healthy · Pixhawk heartbeat < 2 s stale.
Param push
AEOS diffs config/ardupilot/x650.yaml against live FC params and pushes any mismatches. NTRIP corrections injected.
Autonomous flight
Navigator at 25 Hz · OAK-D depth integrated at 3 Hz into voxel map · YOLO detections tagged to 3D world positions.
Failsafe return
Triggers on battery < 15 %, geofence breach, watchdog trip, or operator RTL command. LoRa heal available if link is lost.
Mission close-out
Flight data recorder flushed. Mission trace auto-generated. MQTT LWT beacon publishes online: false.
Designed to do no harm.
Pre-arm safety checks, a continuous in-flight watchdog, and cryptographically signed commands mean every action is verified before it happens. An anomaly at any layer triggers a safe recovery response — not a crash.
Hard block before takeoff
2 Hz continuous monitoring
- Battery < 15 % triggers immediate RTL
- Pixhawk heartbeat lost > 2 s disables arming
- OAK-D subprocess hang → 60 s SIGKILL + USB-VPU power-cycle recovery
- Geofence breach → RTL
- Hardware watchdog: RuntimeWatchdogSec = 300 s
Signed and authenticated
- Every telemetry frame HMAC-signed
- Ground commands signed with ED25519
- SecurityGateway rejects unsigned or replayed packets
- Nonce + timestamp window blocks replay attacks
- Full audit log with HMAC_MISMATCH alerts
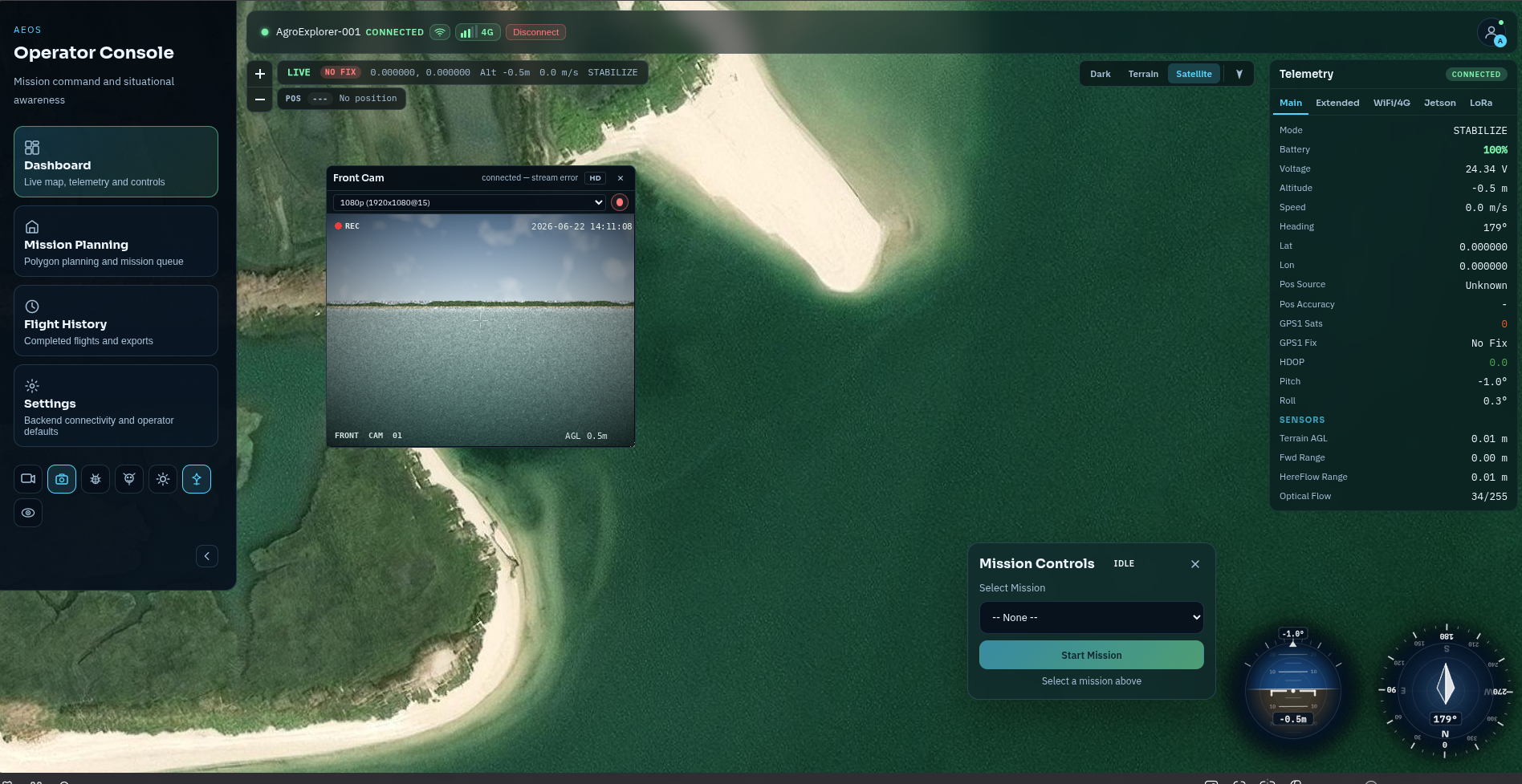
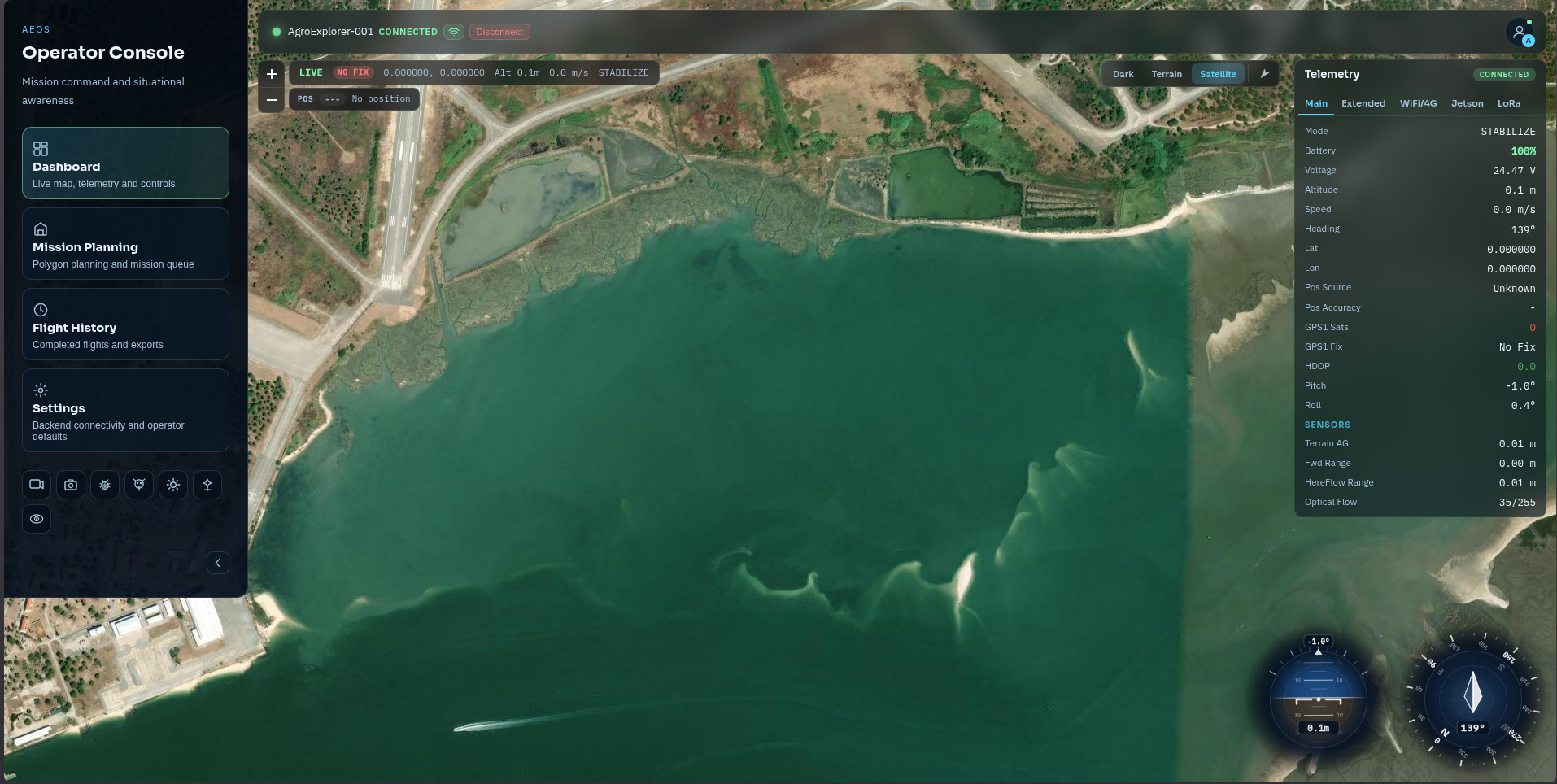
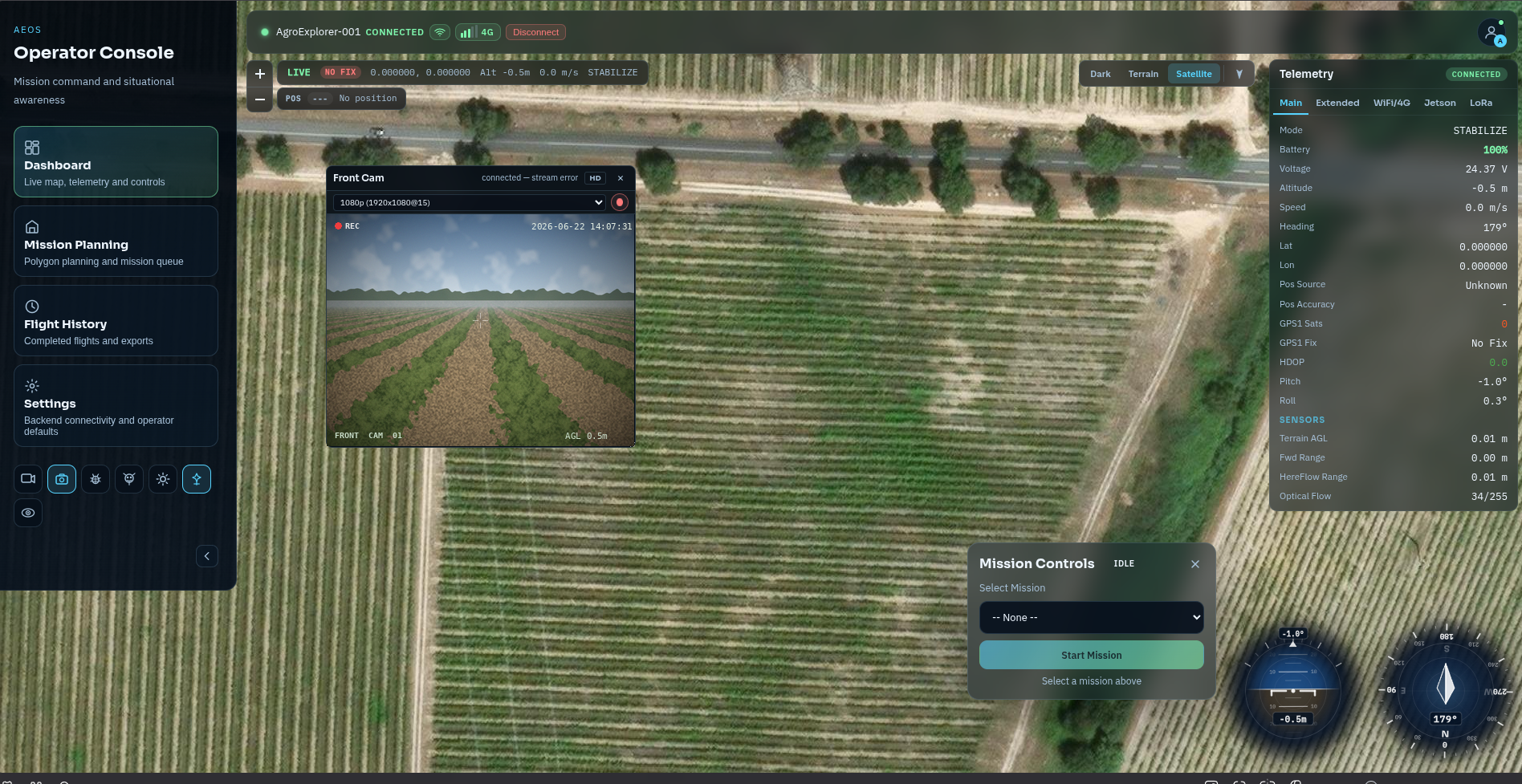
Your whole operation, one screen.
Live drone position on a satellite map, real-time telemetry, onboard video with AI detections, and Athena AI — all in a single browser dashboard. From first arm to post-flight report, you never need to leave it.
A record of everything. Down to the second.
Every mission produces a georeferenced coverage trace with altitude, path, and waypoint timestamps — generated automatically on landing. Share it with your team, file it for compliance, or use it to plan the next flight.
NAVIGATE mission auto-planned by AEOS · coverage path · compliance and agronomy review
SURVEY
High-altitude orthomosaic grid. Terrain following, wide safety margins, automated lawnmower path for NDVI/NDRE coverage.
INSPECT
Low-altitude close-inspection. 360° voxel scan at each waypoint before approach. OAK-D depth on full alert.
CORRIDOR
A-Star planned routes through crop rows and confined passages. Lateral avoidance with YOLO semantic cost overlay.
See AEOS in the field.
Our team configures AgroExplorer to your farm geometry, crop profile, and mission needs — from a single demonstration flight to a full R&D partnership.
info@twoaeon.com · +351 932 340 144